Atlas is an advanced, bipedal humanoid robot created by Boston Dynamics that is designed to perform dynamic tasks typically requiring human-like mobility and agility. Originally unveiled in 2013, Atlas has evolved significantly, showcasing a variety of high-performance features and capabilities over the years. The robot’s primary purpose is to demonstrate cutting-edge robotics technology, with an emphasis on mobility, agility, and versatility.
The robot is powered by a sophisticated combination of machine learning, AI, and advanced mechanical systems, allowing it to perform complex movements such as running, jumping, flipping, and handling obstacles. Its design incorporates sensors, cameras, and LIDAR for spatial awareness, enabling it to interact with its environment autonomously. Atlas is primarily focused on research and development to push the boundaries of what humanoid robots can achieve in real-world environments.
Key Features and Capabilities:
- Mobility and Agility: According to Boston Dynamics‘s blog and videos, Atlas can perform highly complex actions, such as running, leaping over obstacles, and even executing backflips. This agility allows it to perform tasks that involve physical interaction with the environment.
- Electric Actuation: In a recent breakthrough, Atlas transitioned to using electric actuators, marking a significant advancement in the robot’s efficiency and performance. This switch to electric power has allowed Atlas to perform tasks with greater power efficiency and has made its design more compact, lightweight, and suited for various deployment scenarios (as highlighted by Boston Dynamics’ blog on the “Electric New Era for Atlas“).
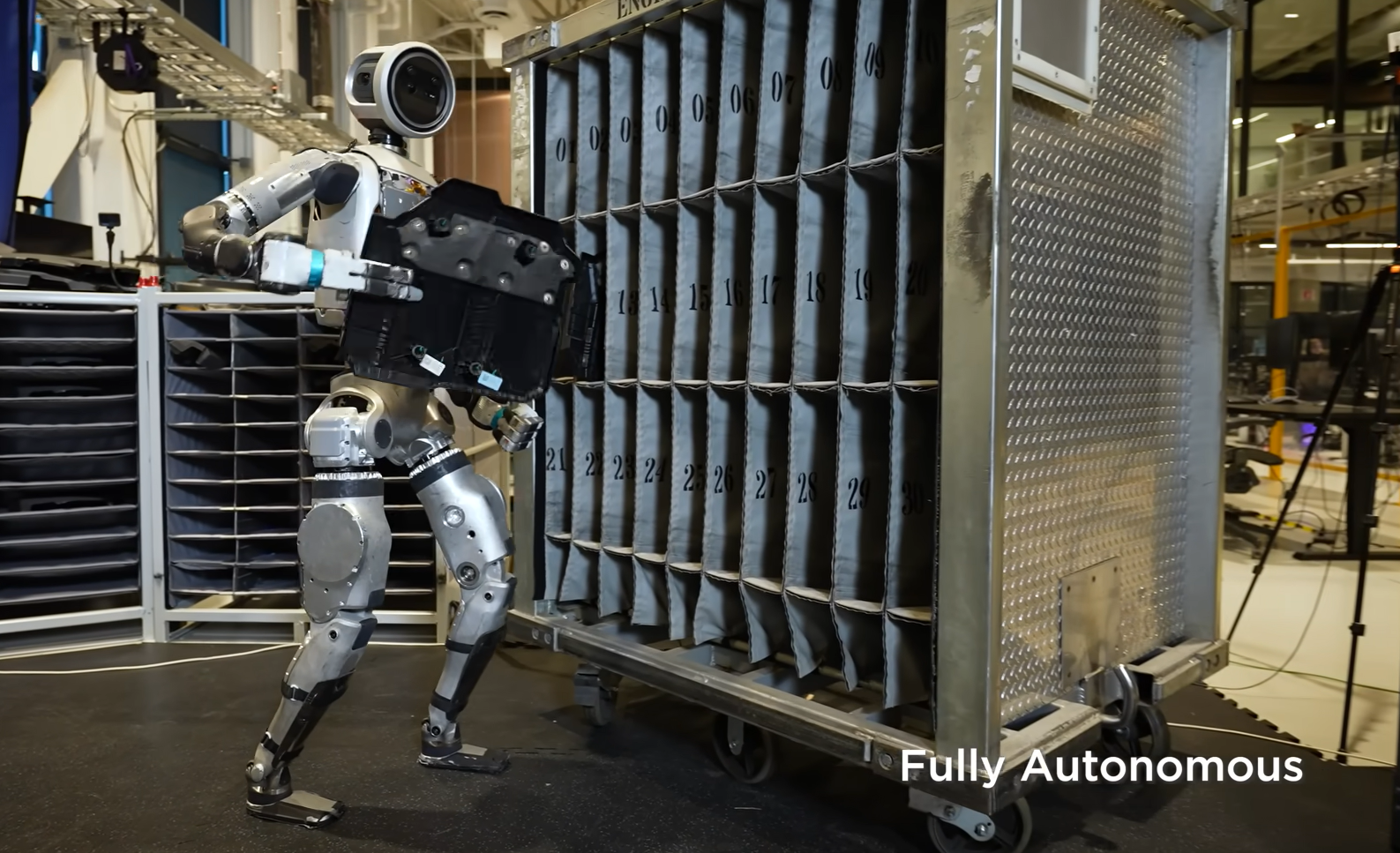
- Environmental Interaction: The robot’s ability to perceive and react to its surroundings is enhanced by advanced sensors. These sensors enable Atlas to adapt its movements to diverse environments, such as navigating rough terrain or performing complex maneuvers in indoor spaces.
- Autonomy: Atlas operates autonomously, with the ability to assess and navigate new environments using its built-in sensors. The AI-driven decision-making system ensures that Atlas can make real-time adjustments to its movements, further enhancing its utility in dynamic settings.
Use Cases and Applications:
Although Atlas is mainly a research tool, its capabilities have the potential to revolutionize industries like logistics, manufacturing, and search-and-rescue operations. The robot’s agility and mobility make it suitable for tasks in environments that are difficult for humans to access, such as disaster zones or hazardous workplaces.
Public Reception and Developments:
The robot has generated significant media interest, with its performances, such as backflips and running at impressive speeds, going viral across various platforms, including YouTube. Boston Dynamics has shared several high-performance videos that showcase Atlas’s athleticism and precise control over its movements, including videos of it performing coordinated actions (e.g., flipping, running, or jumping).
In recent years, Atlas has evolved beyond demonstration purposes to demonstrate real-world use potential. According to reports and blog posts from Boston Dynamics, there has been consideration for potential commercial applications, although Atlas remains largely a research and development project.
Limitations and Future Prospects:
While Atlas is highly advanced, it is still in the early stages of development, and there are limitations to its deployment in real-world applications. The robot is currently quite expensive to produce, and it requires a controlled environment for optimal performance. Additionally, the AI and actuators, while cutting-edge, still have areas for improvement, particularly in terms of power efficiency, durability, and task diversity.
In the future, Boston Dynamics aims to refine Atlas to enable more practical, large-scale applications in industrial settings. The switch to electric actuation and other developments could open up new doors for Atlas‘s use in real-world scenarios, particularly where human-like agility and strength are needed in tough environments.
The Atlas robot represents one of the most sophisticated examples of humanoid robotics. Its impressive agility, advanced sensors, and autonomous functionality set it apart as a true leap forward in the field. While still largely a research project, its future potential in commercial and industrial applications remains highly promising. As Boston Dynamics continues to refine Atlas, it may eventually serve as a powerful tool for industries requiring robots capable of complex, dynamic movements and interactions with their environments.